A Real-Time Monocular Vision-based Frontal Obstacle Detection and Avoidance for Low Cost UAVs
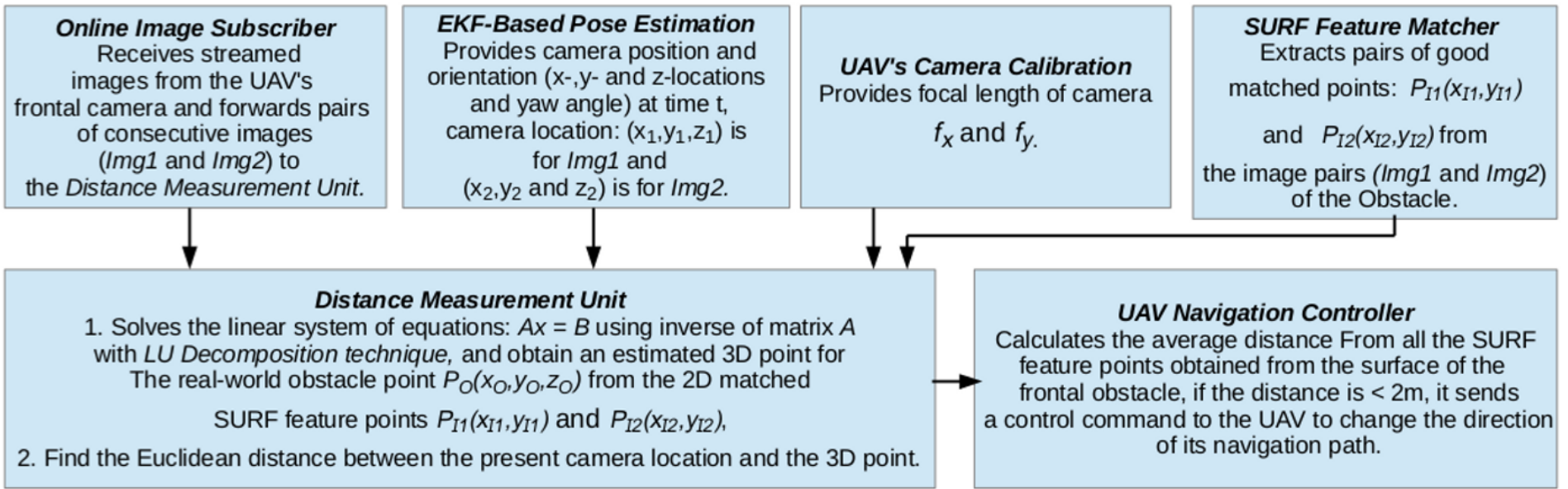
This paper presents a novel monocular vision-based realtime obstacle detection and avoidance for a low cost unmanned aerial vehicle (UAV) in an unstructured, GPS denied environment. We propose a mathematical model to estimate the relative distance from the UAV’s camera to an obstacle which will subsequently be used in a collision avoidance algorithm. We validate our model with some real time experiments under both stationary and dynamic motion of the UAV during its flight. The results show good agreement with the ground truth values with an acceptable percentage of error in estimation under 3% thus proving it can facilitate obstacle detection and avoidance for low cost and lightweight UAVs.
Youtube Video links for obstacle avoidance experiments with Parrot Ar.Drone 2.0:
UAV's camera calibration and Expanded monocular cues
UAV's frontal camera calibration video
Expanded monocular cues/features used for obstacle avoidance task